Find The Domain Of The Vector Function
Holbox
Mar 18, 2025 · 6 min read
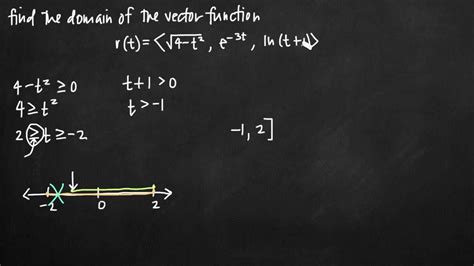
Table of Contents
Finding the Domain of a Vector Function: A Comprehensive Guide
Finding the domain of a vector function is a crucial step in understanding its behavior and properties. Unlike scalar functions, which map real numbers to real numbers, vector functions map real numbers to vectors in a higher-dimensional space (often R², R³, or even higher). This added dimension introduces nuances to determining the domain. This comprehensive guide will equip you with the knowledge and techniques to confidently determine the domain of any vector function you encounter.
Understanding Vector Functions
Before diving into finding the domain, let's solidify our understanding of vector functions. A vector function, often denoted as r(t), r(x), or similar, is a function that maps a scalar input (usually t, x, or another variable) to a vector output. This vector output typically has components that are functions of the input variable. For example, a vector function in R³ might look like:
r(t) = <f(t), g(t), h(t)>
where f(t), g(t), and h(t) are scalar functions of the variable t. Each of these scalar functions contributes to the overall domain of the vector function.
Determining the Domain: A Step-by-Step Approach
The domain of a vector function is the set of all possible input values (e.g., t) for which the function is defined. To find the domain, we systematically analyze each component function:
1. Identify Component Functions
The first step is to clearly identify each component function within the vector function. For example, in the function:
r(t) = <√(t+1), sin(t), 1/(t-2)>
the component functions are:
- f(t) = √(t+1)
- g(t) = sin(t)
- h(t) = 1/(t-2)
2. Find the Domain of Each Component Function
Next, we determine the domain of each individual component function. This involves considering any restrictions imposed by the function's definition:
-
f(t) = √(t+1): The square root function is only defined for non-negative arguments. Therefore, we require t + 1 ≥ 0, which means t ≥ -1. The domain of f(t) is [-1, ∞).
-
g(t) = sin(t): The sine function is defined for all real numbers. The domain of g(t) is (-∞, ∞).
-
h(t) = 1/(t-2): Division by zero is undefined. Therefore, we must exclude the value t = 2 from the domain. The domain of h(t) is (-∞, 2) U (2, ∞).
3. Find the Intersection of the Domains
The domain of the vector function r(t) is the intersection of the domains of its component functions. This means we need to find the values of t that are valid for all component functions simultaneously.
In our example:
- Domain of f(t): [-1, ∞)
- Domain of g(t): (-∞, ∞)
- Domain of h(t): (-∞, 2) U (2, ∞)
The intersection of these domains is [-1, 2) U (2, ∞). This is the domain of the vector function r(t).
Handling Different Types of Functions
The process described above applies broadly, but the specific techniques for finding the domain of each component function might vary depending on the type of function:
Polynomial Functions
Polynomial functions (e.g., f(t) = 3t² + 2t - 1) are defined for all real numbers. Their domain is (-∞, ∞).
Rational Functions
Rational functions (e.g., f(t) = (t+1)/(t-3)) are defined everywhere except where the denominator is zero. We must exclude values of t that make the denominator equal to zero.
Trigonometric Functions
The domains of trigonometric functions (sin, cos, tan, etc.) vary. Sine and cosine are defined for all real numbers. Tangent is undefined at odd multiples of π/2. Similar considerations apply to other trigonometric functions.
Logarithmic Functions
Logarithmic functions (e.g., f(t) = ln(t)) are only defined for positive arguments. The argument of the logarithm must be greater than zero.
Radical Functions
Radical functions (e.g., f(t) = √(t), ³√(t)) have restrictions based on the index of the root. Even-indexed roots (square roots, fourth roots, etc.) require non-negative arguments. Odd-indexed roots (cube roots, fifth roots, etc.) are defined for all real numbers.
Advanced Examples and Considerations
Let's explore more complex examples to further solidify our understanding:
Example 1:
r(t) = <ln(t), √(4-t²), 1/(t-1)>
- Domain of ln(t): (0, ∞)
- Domain of √(4-t²): [-2, 2] (because 4 - t² ≥ 0 implies t² ≤ 4, so -2 ≤ t ≤ 2)
- Domain of 1/(t-1): (-∞, 1) U (1, ∞)
The intersection of these domains is (0, 1) U (1, 2]. This is the domain of r(t).
Example 2:
r(x) = <e^x, tan(x), 1/(1-cos(x))>
- Domain of e^x: (-∞, ∞)
- Domain of tan(x): All real numbers except odd multiples of π/2.
- Domain of 1/(1-cos(x)): All real numbers except even multiples of π.
Finding the precise intersection requires careful consideration of the overlapping restrictions.
Example 3: Parameterization and Implicit Functions
Sometimes, a vector function might be defined implicitly or through parameterization. For example, a curve might be described by x = f(t), y = g(t), where f(t) and g(t) could each have their individual domains that affect the curve's overall domain. This domain represents the set of all (x, y) coordinates that result.
This situation requires finding the overall span of 'x' and 'y' values generated by the parameterization, which can require analysis of both f(t) and g(t) over their respective domains.
Practical Applications and Importance
Understanding the domain of a vector function is critical for several reasons:
- Visualization: Knowing the domain helps you visualize the curve or surface represented by the vector function.
- Calculus Operations: Many calculus operations, such as finding derivatives, integrals, or arc lengths, require the vector function to be defined across the interval of interest. Attempting these operations outside the domain leads to undefined results.
- Physical Modeling: In physics and engineering, vector functions are often used to model trajectories, velocities, and other physical quantities. The domain is essential for understanding the validity of the model within specific time or spatial constraints.
- Numerical Analysis: When using numerical methods to approximate values or perform calculations with vector functions, it's crucial to ensure that the chosen points fall within the defined domain to avoid errors and maintain the accuracy of results.
Conclusion
Determining the domain of a vector function requires a systematic approach that combines careful analysis of each component function and a thorough understanding of the domain restrictions imposed by various function types. By following the steps outlined above and considering the specific characteristics of each component, you can accurately identify the domain and gain a clearer understanding of the behavior and applications of vector functions. Remember that a deep understanding of each component's restrictions and their interactions is fundamental for accurate domain determination, especially in complex scenarios involving combined or implicit functions. Mastering this skill is essential for success in calculus, linear algebra, and various scientific and engineering fields.
Latest Posts
Latest Posts
-
John Is Rollerblading Down A Long
Mar 19, 2025
-
Hydrolysis Of Sucrose A Disaccharide Results In
Mar 19, 2025
-
What Is The Difference Between Mutualism And Synergism
Mar 19, 2025
-
The Supply Of A Good Will Be More Elastic The
Mar 19, 2025
-
What Do Economists Mean When They Say Behavior Is Rational
Mar 19, 2025
Related Post
Thank you for visiting our website which covers about Find The Domain Of The Vector Function . We hope the information provided has been useful to you. Feel free to contact us if you have any questions or need further assistance. See you next time and don't miss to bookmark.
